'Multiview Structure from Motion in trajectory Space' - ICCV 2011
'Multiview Structure from Motion in trajectory Space'. International Conference on Computer Vision (ICCV) 2011 - ACCEPTED
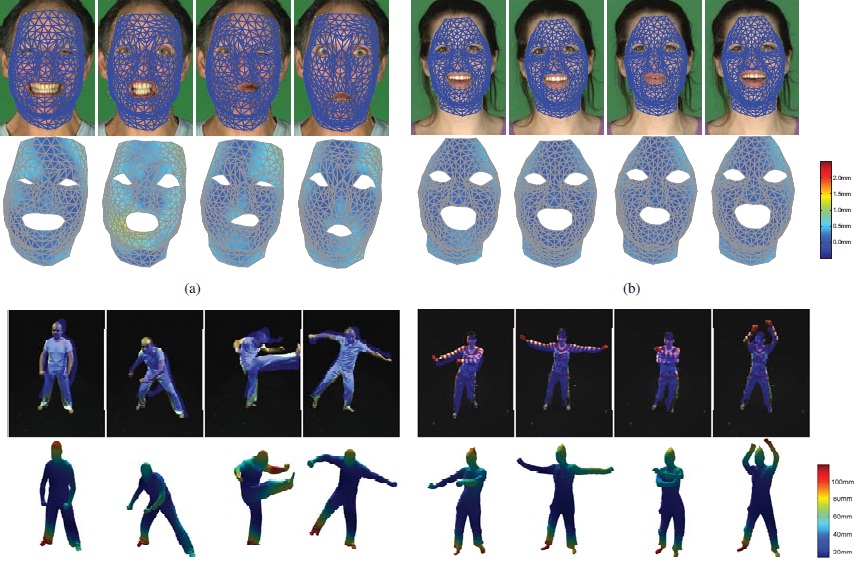
Abstract: Most nonrigid objects exhibit temporal regularities in their deformations. Recently it was proposed that these regularities
can be parameterized by assuming that the nonrigid structure lies in a small dimensional trajectory space. In this paper, we propose a factorization approach for 3D reconstruction from multiple static cameras under the compact trajectory subspace representation. Proposed factorization is analogous to rank-3 factorization of rigid structure from motion problem, in transfromed space. The benefit of our approach is that the 3D trajectory basis can be directly learned from the image observations. This also allows us to impute missing observations and denoise tracking errors without explicit estimation of the 3D structure. In contrast to standard triangulation based methods which require points to be visible in at least two cameras, our approach can reconstruct points, which remain occluded even in all the cameras for quite a long time. This takes our solution especially suitable for occlusion handling in motion capture systems. We demonstrate robustness of our methodon challenging real and synthetic scenarios.
Download Paper : Here
Paper Website Link: cvlab.lums.edu.pk/MultiviewNRSFM
Abstract: Most nonrigid objects exhibit temporal regularities in their deformations. Recently it was proposed that these regularities
can be parameterized by assuming that the nonrigid structure lies in a small dimensional trajectory space. In this paper, we propose a factorization approach for 3D reconstruction from multiple static cameras under the compact trajectory subspace representation. Proposed factorization is analogous to rank-3 factorization of rigid structure from motion problem, in transfromed space. The benefit of our approach is that the 3D trajectory basis can be directly learned from the image observations. This also allows us to impute missing observations and denoise tracking errors without explicit estimation of the 3D structure. In contrast to standard triangulation based methods which require points to be visible in at least two cameras, our approach can reconstruct points, which remain occluded even in all the cameras for quite a long time. This takes our solution especially suitable for occlusion handling in motion capture systems. We demonstrate robustness of our methodon challenging real and synthetic scenarios.
Download Paper : Here
Paper Website Link: cvlab.lums.edu.pk/MultiviewNRSFM
GSOC Project
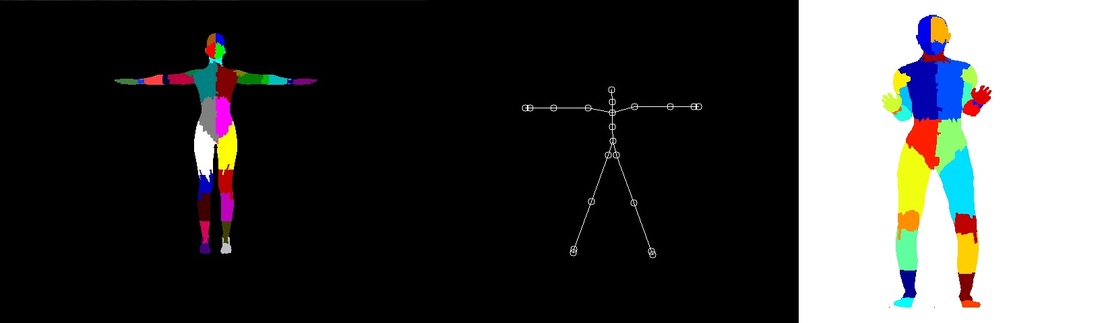
Left: Labelled OpenGL Mesh
Center: BVH Visualized
Right: Matlab Labelled Mesh
Project Webpage : http://code.google.com/p/opencv-kinect/
Center: BVH Visualized
Right: Matlab Labelled Mesh
Project Webpage : http://code.google.com/p/opencv-kinect/
HEP C Nodule Detection (Presentation Made Available)
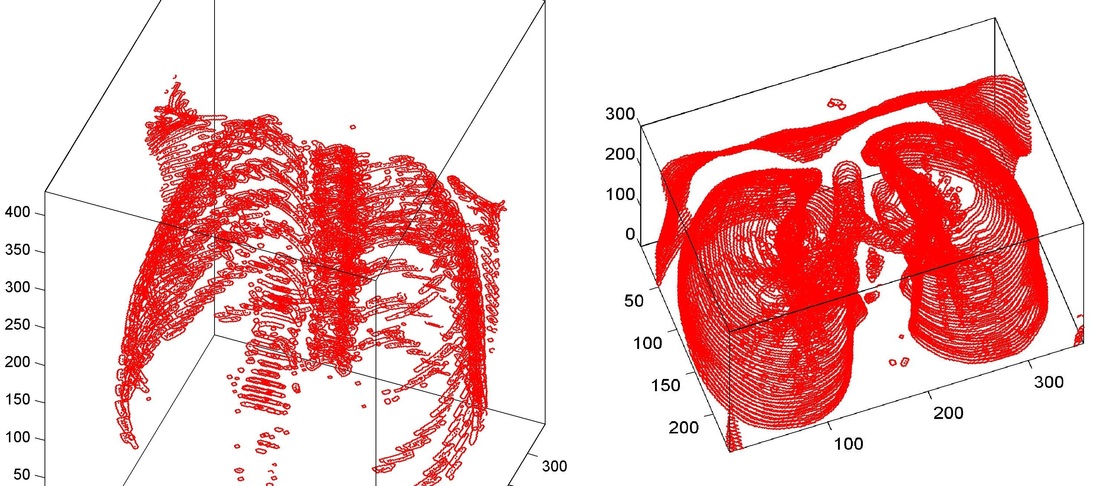
[Extracted view of the Lungs from axial slices from iteration 1].
This project was on Automated Lung Nodule Detection from Axial CT-Slices.
My Work in this project has been the extraction of accurate 3D structure of inner structure of Lungs.
This involved a lot of Image Processing for denoising CT-Slices without losing any inner lung features.
That was followed by a segmenting different features from lungs using k-means.
Following this, i adopted an iterative approach towards segmentation of inner lung features.
Approach for Nodule Detection:
- 3D Fourier Filtering for improving structure - Analysis of Ending Lung Structures.
Presentation : [ PPT]
Code: [to be made available very soon.]
Project Offshoots: Organ Shape Analysis by reconstructing Organs.
My Work in this project has been the extraction of accurate 3D structure of inner structure of Lungs.
This involved a lot of Image Processing for denoising CT-Slices without losing any inner lung features.
That was followed by a segmenting different features from lungs using k-means.
Following this, i adopted an iterative approach towards segmentation of inner lung features.
Approach for Nodule Detection:
- 3D Fourier Filtering for improving structure - Analysis of Ending Lung Structures.
Presentation : [ PPT]
Code: [to be made available very soon.]
Project Offshoots: Organ Shape Analysis by reconstructing Organs.
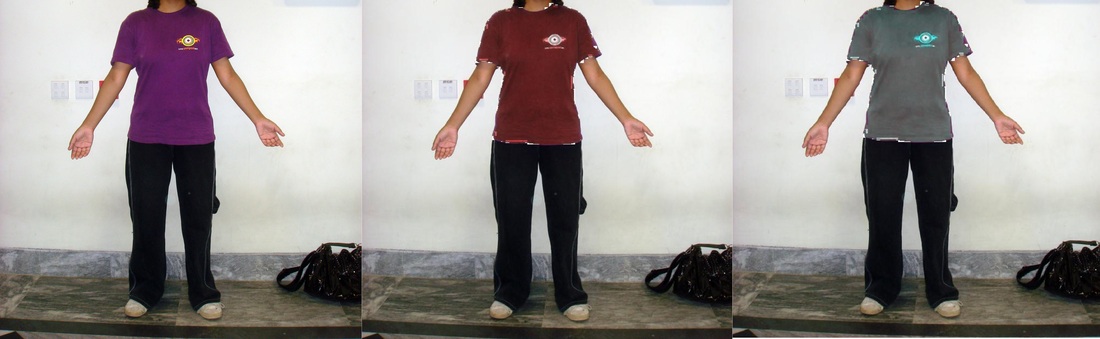
Real Time Apparell Visualization System (Presentation Made Available)
RFLP Imaging Analysis (Presentation Made Available)
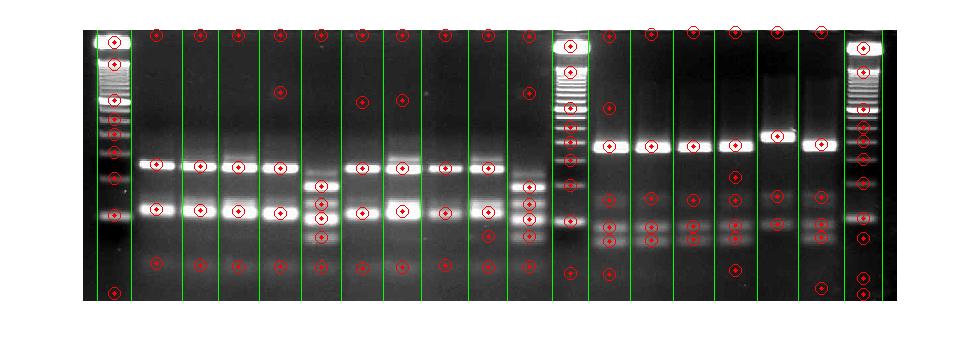
Currently I am working on developing a prototype software that shall be able to automate the analysis of the results of RFLP (Restriction Fragment Length Polymorphism).
- Lane Identification ( Done )
This involved fitting a DCT Model to a Horizontal Gradient Image for the Lanes.
This along with an optimization for minima detection leads to correct Lane Detection.
- Banding Pattern Analysis (Done)
Presentation From My Talk : [PPT]
- Technical Report on work coming soon.
- Lane Identification ( Done )
This involved fitting a DCT Model to a Horizontal Gradient Image for the Lanes.
This along with an optimization for minima detection leads to correct Lane Detection.
- Banding Pattern Analysis (Done)
Presentation From My Talk : [PPT]
- Technical Report on work coming soon.
Poster on HIV Math Modelling

I have a first prize winning poster on the mathematical modelling on HIV Virus on a paper titled Mathematical Analysis of HIV - I: Dynamics in Vivo by Alan S. Perlson and Patrick W.Nelson .
Download Link: 'Click Here'
Here (to be made available)
Download Link: 'Click Here'
Here (to be made available)
Implementation of Probabilistic Road Mapping Algorithm

As an internee at the research group headed by Dr.Abu Bakr , i implemented the PRM Algorithm. For those who do not know what the PRM algorithm is, it is a way of finding the a complex solution that will leave a robot in a certain state given that you know the 3D of the scene.
My Implementation shall be available Soon
My Implementation shall be available Soon
